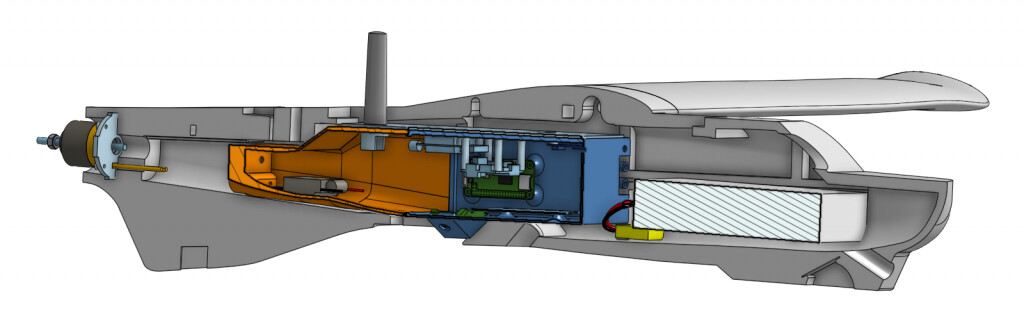
im Rahmen des SearchWing Projekts bauen wir Drohnen für die Seenotrettung im Mittelmeer. Für die Elektronik der Drohne wurde eine Box entworfen und mit einem 3D-Drucker gedruckt.
Unser Team in Berlin sucht gerade Unterstützung beim Drucken der Box, der Erprobung von Polypropylen als Werkstoff und bei der Adaption auf einen neuen Drohnenrumpf. Gibt es hier evtl. Expert_innen, die uns unterstützen wollen?
Für den aktuellen Rumpf wurde die wasserdichte Box nochmal verändert, sodass sie ein anderes Payload Modul (PI Carrier Board) aufnehmen kann. Wir haben in Berlin leider keine Möglichkeit diese zu drucken. Für einen Prusa Drucker haben wir die entsprechenden Parameter. Wenn du eine Möglichkeit zum Drucken hast, müsste man die Parameter überführen, sodass am Ende ein dichter Körper gedruckt wird. Anbei ein Link zum aktuellen Stand:
Für den nächsten Rumpf wäre es super, wenn jemand mit uns ein paar Iteration des Designs/Druck durch machen könnte. Hier müsste das Konzept der alten Box auf den neuen Rumpf übertragen werden. Es wäre auch super cool, wenn wir ein 3D Model des Rumpfs erstellen könnten.
Uns wurde Polypropylen als Werkstoff empfohlen, da Drucke dann nicht mehr nachbehandelt werden müssen um einen dichten Körper zu erhalten. Wenn hier jemand Erfahrung mit PP hat, wären die für uns auch sehr interessant!
schön zu hören, dass es voran geht. Wir machen am 8. Mai ne kleine Geburtstagsfeier und eigentlich soll es da auch möglich sein mit Drohnen zu fliegen. Komm doch da mal vorbei und stell das Teil vor. Vielleicht können wir es ja auch mal 3D-Scannen.
Beim Link kommt leider ein 403 - da musst du die Zugriffsberechtigung nochmal anpassen. Du könntest du Einzeldateien aber auch hier im Forum hochladen. Hast du den eine 3D Version der Box? Dann können wir ja mal nen Testdruck anschmeißen und dann schauen ob es Wasserdicht wird.
Sorry, die Berechtigungen haben ich gerade angepasst. Auf dem Prusa ist der Druck nur wasserdicht, wenn man bestimmte Parameter wählt und den Druck danach noch behandelt. Ich warte gerade auf die Anleitung von unserem Experten.
Wir haben hier in der Machbar einige 3D Drucker stehen mit dem man das machen könnte.
Theoretisch kannst du auch mit PETG den Rumpf wasserdicht drucken aber der Zeitfaktor…
(klar und den richtigen Paramentern)
Mir ist neu das PP wasserdichter als beispielsweise PETG ist, aber wir können von mir aus auch PP drucken. Müsstest du aber das material besorgen.
Wie Martin schon meinte könnten wir den Rumpf mit Hilfe von Photogrametrie einscannen
Hier entsteht gerade die Dokumentation zum Druckprozess.
Mit PP sind die Teile angeblich ohne Nachbehandlung wasserdicht. Wenn ihr dazu keine Erfahrungen habt, würde ich das Thema erstmal zurückstellen.
Wenn wir den Rumpf mit Photogrametrie einscannen können, sodass am Ende verwertbare Daten für die Zeichner rauskommen, würde ich gerne mal vorbeikommen
Wenn du das aus meinem Post herauslesen möchtest
Was ich sagen wollte: das man nicht unbedingt PP braucht um Wasserdicht zu drucken,
in erster Linie bedarf es einen gut funktionierenden Drucker und die richtigen Parameter.
Aber wahrscheinlich würde ich schon aus Gewichtsgründen auch PP wählen,
mann könnte auch über CPE oder OBC (relativ teuer aber 30% leichter als PETG aber mit quasi gleichen Eigenschaften) nachdenken
Da wir kein PP-Filament liegen haben und auch nicht planen welches anzuschaffen, müsste ich dich aber bitten welches mitzubringen
Jeh nachdem wie der Rumpf genau aussieht können wir ihn versuchen zu scannen…:
die Oberfläche darf nicht reflektieren und nicht Monocromatisch (einfarbig) sein, eventuell kann man die Oberfläche z.b mit Keide Spray behandeln und nachher wieder abwaschen. Wenn dem so ist…
heraus kommt eine OBJ bzw. FBX Datei die man dann noch in ein CAD Format überführen müsste…
Habe ich aber leider grade nicht so die Zeit für
Aber ich verstehe nicht so ganz wozu ihr uns braucht wenn ihr schon wisst, was ihr wie drucken möchtet und mit welchen Parametern. Die Parameter auf eurer Website werden für unsere Drucker nicht funktionieren da wir viele Ultimaker besitzen die sich komplett anders verhalten als Prusa Drucker. Es fängt schon damit an das wir dickeres Filament verwenden. Auch sind eure Parameter Anscheinend für ASA und nicht PP gedacht!?
Wir haben auch 2 Drucker die das dünnere 1,75mm Filament verdrucken können was ihr wahrscheinlich ohnehin für die Prusadrucker habt
Ich vermisse in eurer Doku einige Parameter: z.B den Düsendurchmesser, Wanddicke und Linienbreite und ich habe die Befürchtung das eure Box mit einer 100% Füllung unnötig schwer wird
ohne mir jetzt das Model genauer angesehen zu haben :-/
Im Prinzip besteht unsere Gruppe aus zwei Teams. Eins der Teams sitzt in Augsburg und das andere in Berlin. In Berlin haben wir bis jetzt keine Möglichkeit Teile zu drucken bzw. nur in sehr begrenztem Umfang auf einem Ender 3.
Wir würden den aktuellen Entwurf gerne für ein anderes Payload Mainboard (CM4 PI + Carrier Board) anpassen und einen ersten Entwurf (verlinkte Dateien) gerne drucken.
Außerdem würden wir gerne eine größere Box für einen größeren Flieger (Talon Pro → 3D Scan) designen und drucken.
Außerdem würden wir gerne einmal die Druckanleitung testen/verifizieren. Am besten mit einem Experten, da wir in Berlin keine Expertise auf dem Gebiet haben. Wir sind auch sehr an Verbesserungsvorschlägen interessiert.
Wir möchten in Berlin in der Lage sein ebenfalls dichte Boxen zu drucken, wenn es sein muss.
Wir haben mit PP erste Experimente gemacht. Dazu haben wir das folgende Filament verwendet:
Der Druck war erstmal wasserdicht, aber die Struktur war relativ weich und instabil. Im Moment können wir uns nicht vorstellen die ganze Box aus PP zu drucken.
Der Rumpf des Fliegers ist leider sehr einfarbig/weiß. Wahrscheinlich ist er damit recht ungeeignet für einen Scan.
hm das Filament können wir auch verdrucken allerdings nicht mir den Ultimakern.
Der Nachteil von PP ist das es etwas Weicher als beispielsweise PETG ist… aber wenn euch das zu
instabil ist könnte ich mir durchaus mal eure Daten schauen
Der Rumpf des Fliegers ist leider sehr einfarbig/weiß. Wahrscheinlich ist er damit recht ungeeignet für einen Scan.
Da haben wir mehrere Möglichkeiten
Könnte man Kreidespray drauf sprayen um dem ganzen eine Struktur zu geben…
Ihn mit Folie bekleben
gibt es speziellen 3D Scannspray was sich nach 1-2 Stunden komplet auflöst…
Wenn es nur um den Rumpf geht könnte man ihn durchaus einfach in CAD nachkonstruieren (Nach Fotovorlagen)
@Frief: Wir sind nach wie vor aktiv und bearbeiten die verschiedensten Probleme. Karten wollten wir auch schon mal erstellen, aber hatten noch keine Zeit entsprechendes Bildmaterial zu sammeln. Wollten dann mal https://opendronemap.org/ ausprobieren.
Wir hatten nochmal größere Probleme mit Raspberry PIs + Camera und Interferenzen beim GPS. Die normalen Kamerakabel stören das GPS erheblich. Bei einem Kaltstart so sehr, dass das GPS keinen FIX erhält. Außerdem hatten wir nochmal Wassereinbruch, unabhängig davon, ob sie auf einem Ender 3 oder Prusa I3 MK3S+ gedruckt wurden, PETG, ASA oder PP verwendet wurde. Wir werden jetzt wahrscheinlich Epoxy oder Acryllack zur Beschichtung nutzen, da nach einer Behandlung dann kein Wasser mehr eindringt bei 50cm Tiefe und 10Minuten Belastung.
Wenn es nur darum geht eine Kamera in die Luft zu bringen und ein paar Kilometer abzufliegen, lässt sich schnell ein Setup aus fertigen Komponenten bauen. Wir verwenden PixRacer, mRo GPS u-Blox Neo-M9N, RFD900+ Modem, FrySky Taranis X9D+2019 Fernbedineung etc. Gesteuert wird alles mit ArduPilot und QGroundControl. Gerne mal in unserem Wiki stöbern oder mal in unserer Werkstatt am Alexanderplatz vorbeikommen.
Als Payload versuchen wir gerade ein CM4 auf einem Carrier Board von Waveshare einzuführen: CM4-IO-BASE-B - Waveshare Wiki Daten wollen wir gerne per WLAN Live übertragen.
Wir haben auch schon mal eine Wärmebildkamera von Flir getestet.
Meine Erfahrung ist auch dass es schwerer ist die Drucke Wasserdicht zu bekommen als man denkt. Das passiert durch winzige Defekte durch die dann Wasser durchsickern kann.
Ich finde es aber nicht weiter störend die Teile nachzubehandeln, besonders wenn es nur wenige Einzelstücke sind. An PETG hält meiner Erfahrung nach Sprühspachtel super. Akrylfarbe hat auch gut gehalten und ich könnte mir vorstellen, dass andere Sprühlacke auch gehen. Wie ich finde, kein zu großer Aufwand.
Eine andere Variante, ABS drucken und mit Aceton streichen.
Und dann gäbe es noch annealing was ich aber hier für ungeeignet halte.
Noch ein Tip, PETG immer vor dem Drucken trocken halten, sonst wird es spröde und kann leichter brechen. Wenn man es richtig behandelt ist es deutlich duktiler und damit auch stabiler.
Habt ihr schon von dem Paparazzi Projekt gehört. Die hatten vor 10 Jahren auch schon ähnliche Dronen autonom rum fliegen lass. Ich würde vermuten dass vieles von dem was ihr machen wollt schon gelöste Probleme sind.